





一、前言
汽车保有量不断增加,交通拥堵问题日益严重,随之产生的环境污染加重问题以及交通时间浪费问题也变得不可忽视;同时,每年的交通事故数量也居高不下,由此也带来了巨大的人民生命财产损失。图1.1为2010年到2016年中华人民共和国国家统计局发布的关于民用汽车保有量、汽车交通事故量、汽车交通事故死亡人数、受伤人数及直接财产损失的统计数据。交通事故和人民生命财产损失常年居高不下,交通安全问题十分严峻。

图1.1 国家统计局统计数据
汽车虽然给人们的社会交通生活带来了极大地便利,但也带来了不少新的问题。随着汽车保有量的持续快速增长,交通堵塞、交通事故、能源消耗以及环境污染等社会问题也受到了越来越多的关注。根据网络公开的相关公安部交管局发布的统计数据,2016年中国共发生汽车责任道路交通事故16.52万起,导致5.18万人死亡,16.83万人受伤,直接经济损失达到 6630 亿人民币。除了交通事故以外,交通阻塞也对人们的生活产生巨大的影响。
每年节假日高速路段堵车的新闻屡见不鲜,而城市内堵车更被视为生活常态。然而,汽车因拥堵而不断重复起停状态,会让燃油得不到充分的燃烧,不仅增加了油耗,还会产生更多的一氧化碳、碳氢化合物以及氮氧化合物与颗粒物,这些有害物质极大了增加了环境治理的难度。此外,交通拥堵容易使人感到沮丧、烦躁以及愤怒的不良情绪,甚至会对人们的身心健康造成相应的影响。
近年来,随着控制技术与车间通信技术的快速发展,智能网联汽车的概念被提出。如图1.2所示,国家制造强国建设战略咨询委员会发布的《节能与新能源技术路线图》将智能网联技术按照智能化程度划分为5级,按照网联化程度划分为3级,智能网联汽车的最终目标时实现网联自动驾驶。
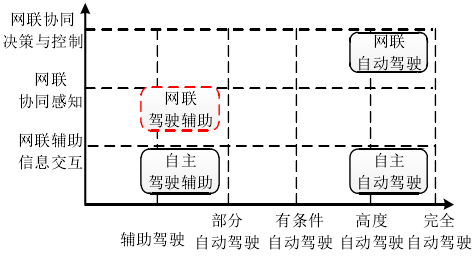
图1.2 智能网联等级划分
智能网联汽车是在一般汽车上增加雷达、摄像头等先进传感器、控制器、执行器等装置,通过车载环境感知系统和信息终端实现与车、路、人等的信息交换,使车辆具备智能环境感知能力,能够自动分析车辆行驶的安全及危险状态,并使车辆按照人的意愿到达目的地,最终实现替代人来做驾驶决策及操作的目的。
智能汽车的初级阶段是具有先进驾驶助系统( Advanced Driver Assistance Systems,ADAS)的汽车,智能汽车与网络相连便成为智能网联汽车。
智能网联汽车本身具备自主的环境感知能力,也是智能交通系统的核心组成部分,是车联网体系的一个结点,通过车载信息终端实现与车、路、行人、业务平台等之间的无线通信和信息交换。智能网联汽车的聚焦点是在车上,发展重点是提高汽车安全性,其终极目标是无人驾驶汽车。
从狭义上上讲,智能网联汽车是搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现V2X智能信息交换共享,具备复杂的环境感知、智能决策、协同控制和执行等功能,可实现安全、舒适、节能、高效行驶,并最终可替代人来操作的新一代汽车。从广义上讲,智能网联汽车是以车辆为主体和主要节点,融合现代通信和网路技术,使车辆与外部节点实现信息共享和协同控制,以达到车辆安全、有序、高效、节能行驶的新一代多车辆系统。
二、关键技术
近两年以来,智能网联汽车研究的热点领域主要集中在以下几个方面。
1、自动驾驶的加速测试
近年来,随着自动驾驶研究热潮的兴起与发展,自动驾驶汽车的测试评价技术变得越来越重要。虽然汽车的智能化与网联化程度不断提高,然而智能网联汽车的功能安全性与驾乘舒适性却没有完善的测试标准与测试方法。
目前,自动驾驶汽车的测试可以分为实车测试和虚拟仿真测试。实车测试又可以分为试验场地测试和真实道路测试,可以较为真实地反映自动驾驶汽车行驶的真实状况,然而实车测试具有路测周期长、成本高、安全风险高、场景覆盖有限且多元化场景的适应能力不足等缺点。虚拟仿真测试利用计算机软件模拟真实环境以及自然交通流,从而完成自动驾驶汽车的规划决策测试。虚拟测试可以模拟实车测试,弥补不可重复、危险场景难以实现等问题,然而无法解决测试时间长的问题。因此,本文对虚拟仿真的加速测试进行了相关的调研工作。
加速测试即通过一定的手段达到加快测试进程,提高测试效率的目的。测试加速主要分为基于加快时间的加速测试和基于提高有效测试场景的加速测试。
1)基于提高有效测试场景的加速测试
基于提高有效测试场景的加速测试是通过一定的方法提高感兴趣测试场景的出现次数,从而加速自动驾驶汽车在所需测试场景中的表现。例如,在虚拟测试中增大危险场景发生的概率,提高自动驾驶汽车遇到危险场景的频次,从而在相对较少的测试里程中遇到更多的危险场景,从而缩短测试里程并加速测试。
2016年,密歇根大学Ding Zhao对自动驾驶汽车的加速测试进行了探究。该文对过去自动驾驶测试的方法进了总结,并提出了加速测试的6步法和四种加速测试方法:基于可能性分析的的加速测试、基于重要性采样技术的加速测试、自适应加速测试、基于随机优化技术的动态场景加测测试,并且进行仿真测试验证了加速测试方法的有效性。加速测试的方法如图2.1所示。
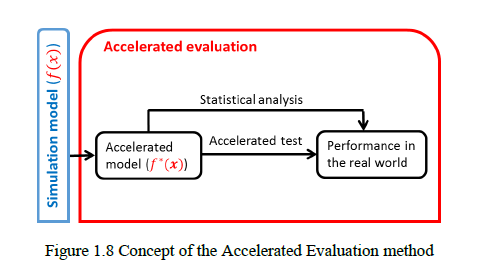
图2.1 加速测试的方法
加速测试的6个步骤如下:
收集大量的自然交通数据;
提取可能造成多车碰撞的事件;
使用随机模型建立碰撞驾驶场景的模型:把其他车辆作为自动驾驶汽车的主要干扰建立模型,随机性被建模为随机变量的向量x,x的概率分布为发f(x);
通过改变概率密度函数减少非安全事故的事件:通过把f(x) 替换为加速的分布f*(x) 来改变干扰数据,进而减少相对安全的事件;
对改变后的概率密度函数进行蒙特卡洛模拟,加强机驾和人驾之间的相互作用;
“歪斜”模拟结果以计算自然驾驶条件下AV的性能。
蒙特卡洛算法可以将驾驶场景变成一个随机模型,基于大数定理,随着重复测试次数的增大,测试结果总是会收敛到真值。但是如果要求结果比较精确,则需要进行大量的测试。使用传统的蒙特卡洛算法进行测试将会耗费大量的时间。若基于实车采集的数据用蒙特卡洛加速算法生成交通场景,虽不能覆盖所有交通场景,但和真实的场景更接近,且可以加快测试速度。
一些研究人员基于从N-FOT获得的数据构建随机模型,并运行蒙特卡罗模拟来评估自动驾驶汽车。杨等人通过构建“可错误的”驾驶员模型来评估防撞系统,以模拟基于道路 - 离场碰撞 - 警告(RDCW)FOT和智能巡航控制(ICC)FOT自然驾驶数据库的人类疏忽。 Woodrooffe等人基于自然驾驶冲突产生了150万个前方碰撞情景,并用它们来评估重型卡车上的碰撞警告和碰撞缓解制动技术。
这种方法的一个主要好处是所有场景/模型都是从自然驾驶记录中提取出来的,因此代表了真实的驾驶场景。使用模拟而不是现场测试可以降低评估成本。但是,如果直接使用蒙特卡罗模拟,自然驾驶的非安全关键部分将占主导地位,因此模拟不能有效地完成。当硬件或人员处于循环中时,此方法可能无法加速该过程。

图2.2 加速测试方法原理与流程
2)基于加快时间的加速测试
仿真模拟建立在对现实世界的模拟之上,需要依赖现实世界的流逝,但随着计算机硬件性能的提升,在进行某些仿真任务时,计算机在按照真实时间进行仿真模拟时并没有消耗其全部的计算资源。因此,如果能够让计算机模拟的速度以高于真实时间的速率运行,那将可以加快仿真速率并减少仿真时间。
基于加快时间的加速测试即依赖计算机群强大的计算力将仿真任务分配给各个计算节点,从而实现虚拟仿真的分布式并行计算以加快测试的运行速度,从而加速测试。
分布式计算可以将计算和存储任务进行拆分,让互相连接的每一台计算机承担一部分的计算和存储任务,并在需要的时候进行数据的同步和收集,降低单个节点成本,提供系统整体的计算能力和存储容量。常见的分布式框架有Hadoop,Storm,Spark。
云计算包括分布式计算、并行计算和网格计算。通过云计算来实现虚拟仿真的加速测试,可以通过并行计算同时测试多个测试用例,而分布式计算通过分解仿真任务加快虚拟仿真测试。因此,云计算可以通过同时运行多个测试用例并分配仿真计算任务来实现虚拟仿真的加速测试。
3)小结
传统的加速测试主要关注于提高危险场景的出现频次来实现加速测试。而随着分布式计算、并行计算以及云计算等计算机技术的发展,同时运行多个测试用例并分配计算任务以加快仿真时间的方法将逐渐发展起来。今后,分布式计算、并行计算以及云计算技术与传统的加速测试技术结合起来进行虚拟仿真的加速测试将成为今后自动驾驶测试技术发展的趋势。
2、多车协同控制
车辆协同控制,是指在兼顾道路交通安全与效率的前提下,充分利用道路条件,将若干单车组成跨车道柔性车队,使其不仅具有单车道车队速度快、间距小等特点,还能根据不同道路条件,通过车队之间的协调与合作,一方面简化交通控制与管理的复杂程度,有效减缓交通拥堵;另一方面可以减少由人为因素所致的交通事故,保证交通安全,并在此基础上节约能源,减少环境污染。
网联驾驶辅助系统与自主驾驶辅助系统的区别在于网联驾驶辅助系统通过车间/车路(V2X)通信技术对交通环境进行感知,V2X通信技术相对于车载传感器感知范围更广,且能够方便直接的获取丰富的交通信息。
1)应用场景层面
多车协同控制可以应用于多个典型的场景之中,例如交通状况良好的高速公路、城市环境中的交叉路口和收费站入口等合流场景。
① 高速公路场景
随着成本更低、可靠性更强的传感器逐步推向市场,国内外针对于队列行驶的研发工作也越来越多,各个国家针对自动驾驶和队列行驶的研究组织也在不断增加。20世纪80年代美国加利福尼亚州的PATH项目是解决车辆队列问题的最早计划之一。该项目的目标是通过对现有基础设施的最小改动来最大化提高公路运营能力和车流量。该项目背景假定所有高速公路上的车辆都是自动行驶的,包括车队的头车,在保持车间距离尽可能小的前提下,该研究提高道路通行能力和交通效率,同时确保队列行驶的稳定性。
对于车间通信,文献主要介绍了无人车车队高速行驶时车间通信的发展历程以及其主要结构、工作方式,详细阐述了通信网络在车辆队列行驶中的重要性。日本的Tsugawa等人于2000年提出了车辆协同驾驶系统结构。该系统结构在分析了车辆协同驾驶功能需求和任务分解的基础上,设计了包括交通控制层、车辆管理层和车辆控制层的三层体系结构,如下图2.3所示。
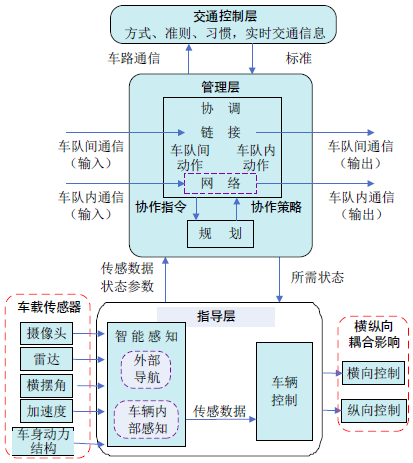
图2.3 车辆协同驾驶系统结构
其交通控制层位于路侧,其中,搭建的路侧设备,如可变情报板、标示牌、通信设备等,均用于支持车辆的协同驾驶;制定的基本准则,如规则、规定、行为方式等,均用于指导车辆的协同驾驶。车辆管理层和控制层位于车载端,用于协同驾驶策略的决策与执行。
此后,加拿大的Halle等人吸取和借鉴了Tsugawa的成果,提出了车辆协同驾驶系统结构,主要对管理层和控制层进行具体的模块化设计,并针对车队协同驾驶过程中数据采集与处理、车队协同控制、车队通信、策略决策等做了详细的说明。此系统结构都具有较高的实用价值,为车辆协同控制系统提供了很好的参考。

图2.4 车辆协同驾驶系统改进结构
协作驾驶挑战(Grand Cooperative Driving Challenge,GCDC)2011是由荷兰应用科学委员会(the Netherlands Organisation,TNO)组织,为了推进驾驶协作系统而举办的一场竞赛。在2011年的GCDC竞赛中,车辆自动控制只实现了纵向控制,而车辆的横向控制是由驾驶员自主进行的;项目用来进行试验的场地车辆包括重型车辆与乘用车,除了某些通信受限的车辆,每辆车都配备了不同数量的传感器组,分别在城市和高速公路的驾驶场地下都进行了测试。协作驾驶挑战(Grand Cooperative Driving Challenge,GCDC)2016是GCDC 2011的延续。不同的是这次竞赛的焦点不仅仅局限于纯粹的队列行驶,本次比赛的焦点还包括队列合并和合作导航。
应用于多车协同控制的模糊控制器优点是其简单、灵活并易于处理非线性系统。文献提出了一种基于模糊控制的多车巡航控制结构。这是西班牙AUTOPIA项目的一部分,旨在开发用于各种自动车辆应用试验的试验台。文献设计了一个基于多车系统的横向和纵向控制的模糊控制器,但由于视觉算法的限制其无法应用于高速行驶的车辆。
PID控制结构简单,在实际应用时具有一定的优势。PID多车协同控制是Naus等人在多车系统稳定性分析方向的研究成果之一,但是该研究在分析多车协同控制系统稳定性时没有考虑通信和执行器的延迟。该研究对多车系统控制系统稳定性分析主要包括两部分:首先基于不同种类的车辆找到合理的稳定性标准,其次对恒定间距和可变间距策略进行了比较。最终得出在不考虑通信延迟的情况下,变间距策略的控制效果更好这一结论。
在2011年的GCDC挑战中,大多数协同式自适应控制的实现都使用了含有一个前馈的线性反馈控制器,但是该方法拥有一定的局限性。线性反馈控制器假定一个简化的汽车模型,模型参数对反馈控制器的影响可以忽略不计,然而在实际行驶过程中,汽车模型随着车辆中的乘客数量,轮胎牵引力,道路状况和是否拥有斜坡等因素的变化而变化。
反馈控制器的设计需基于周围环境为理想环境这一假设,这常常会导致控制器在现实应用中表现不佳;且上述方法也没有考虑车辆本身的物理特性,如车辆最大行驶速度,最大加速度和制动减速度等。Lee等人使用PID控制器结合CARSIM对起亚车进行了联合仿真测试。
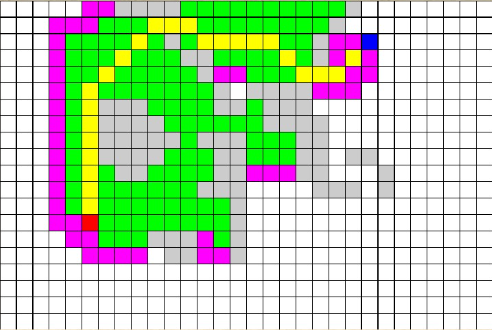
图2.5 仿真测试效果图
Bu等人在Infinity FX45上演示了一款在线模型预测控制器车辆。该文献将在线MPC与车载ACC控制器结合在一起,把来自MPC控制器的输出被转换成一个虚拟速度命令,输入到ACC控制器。这种分为两阶段的方在管理车辆间距方面非常有效。
②车辆合流场景
由于车道变换安全性的重要性,最近的文献已经致力于车道变换的四个主要方面,即车辆变道预警系统,车辆变道行为研究,车辆变道轨迹规划和车辆变道控制器设计。
车辆变道预警系统。根据ISO标准17387,车辆变道决策辅助系统(lane change decision aid system, LCDAS)包括三种不同类型的警告系统:盲点警告(blind spot warning, BSW),车辆接近警告(vehicle proximity warning, VPW)和车道变更警告(lane change warning, LCW)。在BSW系统中,如果任何障碍物干扰驾驶员的盲点或区域,则会触发警告消息。VPW系统能够在相邻车道从后面识别接近的车辆。LCW系统被认为是混合系统,其具有BSW系统和VPW系统的功能。根据该标准,已经进行了一些研究。
例如,Hiller等人中基于速度障碍物的概念,提出了针对邻近车辆的碰撞预警方法,其设计为警告驾驶员潜在的前方碰撞和可能危险的变道操纵。为了避免变道中的假警报,需要预测车道变更操纵。Tomar等人提出了一种警告和干预策略,以帮助驾驶员进行变道操作。该策略包括相对运动估计器和监控器。为了评估变道情况中的威胁,车辆传感器信息和后侧雷达传感器信息已经在相对运动估计器中组合。
车辆变道行为研究。前人已经在车辆变道行为研究中进行了许多工作,这些研究表明,驾驶员改变车道的决定与驾驶员特性,驾驶员态度(例如积极行为)相关,并且取决于许多因素。由于此项研究与多车协同控制技术相关性不强,在此不详细介绍。
车辆变道轨迹规划。在车辆变道期间一定要跟踪一条预先规划好的轨迹。因此,轨迹规划在自主车道变换操作中是非常重要的问题。其主要目的是生成满足一些限制或目标(例如加速度,联合抖动,时间间隔最小化,振动,避撞或其他动态约束)的从当前车道到目标车道的轨迹,在很多车辆变道轨迹规划研究。在机器人领域中经常提及的经典轨迹规划策略,例如路线图,细胞分解和人工势场方法。
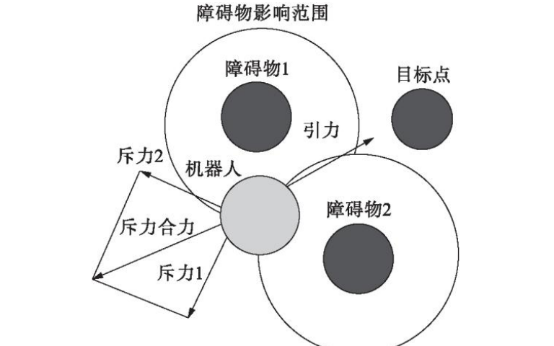
(a)栅格法
(b)人工势场法
图2.6 常用路径规划方法
然而,他们有可能陷入局部最低点。此外,在参数过多的情况下,需要极长的时间才能收敛至全局最小值。实际上,用于车道变换的轨迹规划总是简单的。现有的方法有各种类型的曲线—圆形,谐波,多项式和线段法等。除此以外,还提出了梯形加速度曲线轨迹以产生用于车道变换的最小可能横向加速度的方法。该文献还评估了三种不同的路径规划方法:状态网格、基于搜索树的样条法,基于约束的预测规划。尽管有这些发展,最新的趋势集中在基于协作技术的规划方法。
车辆变道控制器设计。为了实现自动变道,应该开发控制器以根据车辆状态和道路信息跟踪预定轨迹。目前已经提出了许多不同的用于轨迹跟踪的控制算法。Bayar设计了一种用于轨迹跟踪的传统PID控制器,这不仅是因为其结构简单,易于实现,还因为其可接受的跟踪性能,然而,该控制器不能满足需要高跟踪精度的场合。在Berntorp等人的研究中,得出了基于偏航加速度最小化的最优轨迹,并且还使用不同的速度值进行了模拟和比较分析。Ying等人通过滑模法针对多车协同系统研究了车辆纵向车道变换的纵向和横向耦合控制。Ren等人对上述方法进行了优化,设计了一个两层非线性自适应转向控制器。自适应控制器能够处理具有自组织能力的参数不确定性,然而,这需要较高的计算成本。
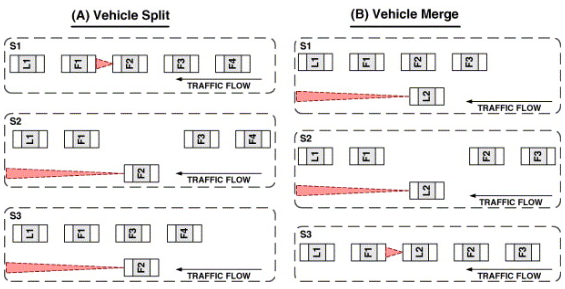
国外对于高速公路入口匝道与主车道之间的车道变更与合并问题进行了深入研究,文献设计了一个高速公路入口车辆合并模拟器,用来研究不同车辆类型对车流量的影响。他首先对车辆变道操作进行了分析,如下图所示,

图2.7 车辆变道操作分析
并针对四车辆汇合与分散的情况进行了分析,
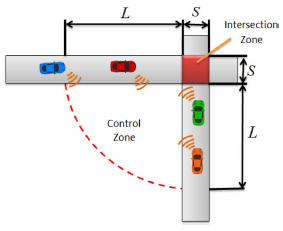
图2.8 四车辆协同控制模型
③ 交叉路口场景
一般来讲,交叉口上的交叉顺序由交通灯或停车标志控制。在合流公路的情况下,匝道计量是调节合流到高速公路的车辆流量的一种常用方法,但也意味着在第二条道路上的车辆必须停车以减少交通拥挤,这两个场景如下图所示。
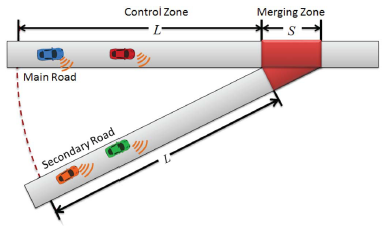
图2.9 两种典型交叉路口场景
2)应用功能层面
基于不用的应用场景,对于多车协同控制的研究目标也有所不同。例如,在交通状况相对复杂的环境下,多车协同控制的主要目标多为路径规划和协同避障;而在交通情况良好的环境下,研究方向多为自适应巡航等。
① 协同路径规划
多车协同路径规划的研究方向之一是换道轨迹规划和轨迹跟踪。轨迹规划方法有基于几何法和优化算法两种。几何法轨迹规划简单、迅速,能够提高车辆实时性,但同时因为未充分考虑车辆的运动学约束和动力学约束,可能导致车辆不能实时跟踪规划的轨迹,如基于正弦曲线的轨迹规划;相反,优化算法考虑了车辆的动力学约束,为车辆实时跟踪提供了前提,但计算复杂。轨迹跟踪控制主要是基于车辆五自由度动力学模型的控制,控制较为精确,同时因为模型非线性,自由度较多,为简化模型,多只采用横向控制,忽略了换道控制的纵横向耦合特性,如滑模轨迹跟踪控制。
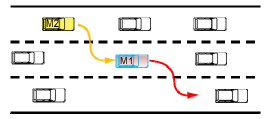
图2.10 协同行为示意图
协同换道控制策略是基于车车通信的环境下为完成安全换道提出的控制策略,国内外研究集中在合流区协同换道控制策略和双车道(或三车道)协同换道控制策略。合流区协同换道控制策略是指合流车为实现合流目的必须实现车道变换,是一种强制车道变换。目前其研究方法是将合流区场景简化为两辆车的场景,较为简单;其协同控制方法是将安全距离指标加入目标函数进行协同控制,但其未充分考虑其他车辆的影响。双车道(或三车道)协同换道控制策略是基于规则的换道策略,只能用于交通流仿真,而且在控制方法方面还处于分析阶段,有待进一步研究。
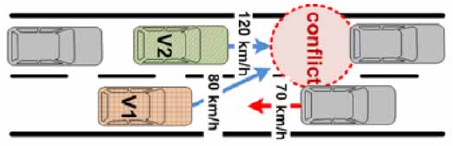
图2.11 双车道协同场景
多车协同换道中,换道轨迹规划对各个换道车辆的换道安全性、舒适性和交通通行效率有重要影响。目前的轨迹规划中,基于多项式的换道轨迹规划能够较好保证换道过程中的舒适性、计算的实时性、曲率变化率的连续性等,是自动换道轨迹制定中最优的曲线之一。
② 协同自适应巡航
自适应巡航控制和协同式自适应巡航控制之间的主要区别在于引入车辆位置,速度和加速度在无线网络中的车辆之间的无线通信。协同式自适应巡航控制已被证明允许更小的车间间距,同时能够保持车辆队列的稳定性。但是,通用的协同式自适应巡航控制器还没有开发出来,目前大部分控制器的设计只是针对特定场景进行了算法优化。
目前的协同式自适应巡航控制器的控制结构仅考虑本车车辆与本车车辆前方的单个车辆或多个车辆之间的间距策略问题。为了避免可能发生的后车车辆与本车车辆的追尾碰撞事件,一种可行的策略是设计变更车道辅助系统,基于此来帮助车辆检测变道环境,环境安全允许下运行变道辅助系统。在实际行驶过程中,驾驶员如果在变更车道过程中稍有不慎,就可能陷入危险,变更车道辅助系统常常需要车辆自身配备雷达传感器,警告显示灯,信息显示屏和激活按钮等。如图2.12所示,一般来讲,车辆的尾部需要配备两个雷达传感器来检测后方及侧方车辆的位置状态信息,再通过传感器与控制器的集成来实现对车辆换道辅助系统的控制。
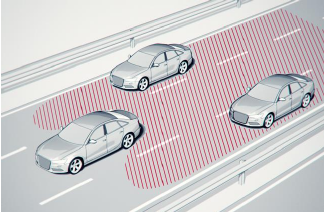
图2.12 环境检测系统示意图
3)智能网联汽车信息安全
智能网联汽车是信息技术超越传统信息领域、不需要人类的干预自主改造现实世界的为数不多案例之一,有必要去仔细分析其对人和信息的关系、人类信息生产的变革作用。
智能网联汽车使用了数百万行代码和各种相互连接的系统和传感器—所有这些都有可能被操纵或被破坏。智能网联汽车可能受到的威胁包括传感器干扰、伪造的车辆通信、数据泄漏和物理攻击,这些可能会影响车辆本身及其安全系统或车主的数据。在更严重的情况下,安全问题会影响乘客和其他人的安全。
目前,针对无人驾驶车辆的一些攻击,需要访问一般人难以访问到的设备。最可能的威胁来自容易获取的项目和知识,使用笔记本电脑、USB数据线和从互联网上下载的一些软件的攻击,比那些使用激光和其他部件的软件更有可能对智能网联汽车的传感器造成威胁。对于开发商和制造商来说,了解当前的威胁形势是很重要的:犯罪分子目前正在开发什么方法攻击智能网联汽车;有谁有兴趣攻击智能网联汽车以及这么做的目的。
当前,汽车产业与信息通信技术深度融合,汽车产品加快向智能化和网联化方向发展,在满足交通出行的基础上,汽车转变为大型移动智能终端、储能单元和数字空间。在这一发展过程中,涉及多个系统的海量信息传输,一旦发生安全事故将对财产安全、人身安全甚至国家安全造成严重的影响。近年来,汽车信息安全事故频发,著名的事件有:宝马汽车 connected Drive 功能漏洞造成的大规模远程修复、JEEP 汽车可远程破解导致 140 万辆汽车被召回等。因此,信息安全问题是汽车产业转型升级发展的重中之重,只有实现汽车的信息安全才能保障智能网联汽车健康发展。
我国对汽车信息安全技术研究起步较晚,直至“十二五”才首次提出将汽车信息安全作为关键基础问题进行研究。
① 加密和认证技术
数据和通信安全方面,北京邮电大学的孟震提出了终端使用永久有效的认证证书和实时更新的临时假名证书相结合的认证方式,改进智能网联汽车的通信系统;电子科技大学的张鸥设计了基于车载中心网关节点的安全网关总线防御机制,提出基于混合消息认证码的集中式认证机制、基于多重计数器的新鲜度管理策略、基于双向挑战认证模式的节点认证策略等安全网关技术,并应用于 AUTOSAR 构架的硬件中;中国软件评测中心的丁文龙等对车载 CAN 总线与网关进行了渗透测试,发现 OBD 接口是车载 CAN 总线信息安全方面的薄弱点,应设置物理防范措施、校验功能和防火墙;中国汽车技术研究中心的高夕冉等提出云平台的服务器组的安全防护应采用基于 DES 安全算法的软加密机制和硬加密设备结合的方式,APP 采用源代码、SO/SDK、APP 安全加固等三重防护,T–BOX 采用源代码保护和白盒 AES 加密技术;上汽通用五菱汽车股份有限公司的彭杨等针对 T–BOX 面临的安全威胁,提出 AES 信息加密、基于 RSA 或 HMAC 加密算法的双向认证、数字签名、时间戳和计数器等安全防护方案;重庆工程学院的王娟提出车载网关是汽车信息安全与功能安全的结合物,应遵循 ISO26262 开发流程与要求,并采用安全机制和加密算法。
汽车系统的维护升级方面,电子科技大学的张海强对 T–BOX 安全远程升级技术进行了改进,使用硬件加密机、安全元件智能 SE 卡等硬件、结合 PKI 证书体系、密钥管理体系等方法提高安全等级;天津大学的陈程杰研究了基于 CAN 总线的新型Bootloader ECU 在线刷写和远程服务系统,设计安全访问和强制进入两种刷写模式。
另外,考虑到用户的隐私安全问题,北京交通大学的沈岑着重研究了汽车通信安全和隐私防护机制,提出了在车辆漫游场景下基于椭圆曲线密码的安全认证方案和位置服务场景下基于差分隐私的轨迹隐私保护方案,有效减少位置隐私泄露风险。
综上,针对智能网联汽车信息安全的薄弱环节,往往综合使用加密技术和认证技术进行信息安全保护,包括数据加密、通讯加密、身份认证、数字签名等多种形式,确保汽车信息的机密性、完整性和可用性。
② 入侵检测技术
汽车 CAN 总线网络和网关的入侵检测技术研究成果较为丰富。电子科技大学的曾凡设计了字节级别和位级别的入侵检测规则,设计并实现了完整的基于 CAN 总线网络的入侵检测系统,包括数据采集、数据预处理、入侵检测引擎、记录与告警、规则更新等模块;吉林大学的于赫等提出了使用 CAN 总线信息熵和报文相对距离进行 CAN 总线网络异常检测的方法;成都理工大学的王礼设计了仪表数据更新系统进行 CAN 网络诊断,系统与汽车仪表和 CAN 报文收发工具连接完成在线检测,避免拆卸仪表;湖南大学的朱立民针对普通 CAN 总线的安全缺陷提出基于 AES–CCM 算法的安全 CAN 总线协议,并提出了针对 AES 解密的 DFA 攻击方法和基于 S 盒分布表的优化攻击方法,提高攻击速度;天津理工大学的杨宏研究了基于特征和信息熵的异常检测系统和基于支持向量机的异常检测系统,仿真实验结果显示其对 CAN 总线报文数据的篡改攻击有很好的检测效果。
VANET 信息安全方面,吉林大学的博士研究生黄玥进行了系统的研究。针对 VANET 的特殊性质提出 VANET 入侵检测系统整体架构设计方案,引入车辆节点本地检测机制和协同响应机制;针对 VANET 中安全消息的泛洪攻击、女巫攻击及重放攻击提出了基于熵的异常检测方法;为提高检测准确率,提出基于优化的随机森林的异常检测方法。
可以看出,入侵检测技术可以有效弥补加密和认证机制的不足,对网络防御进行有效补充。相比于高级加密认证和数字签名技术,汽车 CAN 网络总线和网关的入侵监测系统更符合目前的信息安全需求,可运用向量机、信息熵等多种理论方法进行入侵检测系统优化;VANET 尚处于开发阶段,无线传输的开放性环境对V2X 信息安全提出了更高要求,目前主要有基于熵的异常检测方法和基于优化的随机森林的异常检测方法两种。
③ 威胁建模技术
安全威胁必然伴随着技术的发展不断出现,部分学者对汽车威胁的种类进行了总结归纳,并提出对应的解决措施。中国信息科学研究院的冯志杰等梳理了车载信息系统、ECU 系统、行车信息感知系统遭受攻击的途径和种类,并从汽车主动和被动两方面提出防护技术方法;上汽通用五菱汽车股份有限公司的彭杨等分析了网络层的数据篡改攻击、网络层的 Dos 攻击以及应用层的安全漏洞等安全威胁,提出应深入车辆安全认证技术和研发汽车电子设备的访问控制技术等关键技术的研发、制定车联网配套标准、汽车厂商互联网公司跨界合作、健全相关法律体系等建议;江苏警官学院的李馥娟等在分析车域网、VANET 和车载移动互联网面临的安全威胁的基础上,提出基于 DSS 与对称加密相结合的数字签名、身份认证、数据验证、可信计算 4 个方面对车联网安全提出相应的解决方案。
有学者针对具体的车辆安全威胁和关键技术展开了深入研究,辽宁大学的周翰逊等针对车联网蠕虫威胁建立了随机传播模型,包括没有安全软件防护的理想车联网环境下基于 Galton-Watson 分支过程的模型,证明车联网蠕虫传播的灭绝概率只与车流有关,而与车流的概率分布形式无关,有安全软件防护的现实车联网环境下,车流符合泊松分布时的排队论模型和车流符合正态分布时的马尔可夫模型;电子科技大学的黄涛针对车控网络的漏洞设计了面向 UDS 协议的模糊测试系统,可有效进行漏洞挖掘。
车辆安全威胁问题逐渐引起重视,但目前针对性的车辆安全威胁模型较少,安全威胁模型应在产品或技术开发之前创建,并随着产品或技术的更新升级根据目标的改变进行持续的维护和更新,从而有效应对系统持续出现的缺陷和漏洞。
三、发展趋势与展望
对于自动驾驶车辆来说,从硬件结构来说需要具备的基本组件通常包括融合了毫米波雷达、激光雷达、磁罗盘、车辆运动传感器、卫星定位系统、机器视觉系统等多车载传感系统以及对传感器信息进行处理后实现车辆控制的车载控制系统组成。从软件层面上讲,自动驾驶技术是一个融合了环境感知、路径规划、控制决策等关键技术的前沿研究课题,其安全性与可靠性仍然有待进一步提高,在其可靠性达到一定程度之前由此带来的相关法律伦理问题也是社会关注的焦点,所以尽管当前已经有许多研究机构,如google推出了具 level5级别的自动驾驶原型车辆,且有研究表明自动驾驶车辆的事故概率小于人类驾驶员,但各大汽车厂商在把相应技术推向市场的过程中仍然抱着十分谨慎的态度。
对于智能汽车技术发展来说,是从仅依靠传感器的单车智能化技术发展起步,并伴随着通信技术的日益成熟,逐渐开始朝着网联化的方向迈进的过程。而到如今,单车智能化、网联化两个方向正齐头并进相互促进共同推动着智能网联汽车的发展,其终极目标都是实现车辆的无人驾驶。
2015年5月,国务院发布了“十三五”规划纲要,明确实施“中国制造2025”。其中已将智能网联汽车产业纳入重点领域,并且制定了清晰的发展路线图。在智能网联汽车的研究当中,通信技术对系统的设计与实现起到了举足轻重的作用。随着网络及通信等技术的不断发展,车车通信网络的应用使得车辆的行驶过程可以从过去依赖自身传感器的独立行驶,逐渐由单向通信向双向通信发展,最后发展到建立以车载自组网为基础的全方位通信网络。
版权声明:凡本网注明来源为"节能与新能源汽车年鉴"的,版权均属于本网,转载请注明来源。本网转载自其它媒体的信息,不代表本网观点,转载均有出处,对转载文章不存在侵权等法律问题。